소형 태양전력돛 실증기 '이카로스' 후기운용보고.
2012년 3월 21일
우주항공연구개발기구
이카로스 데모팀 리더
모리 오사무.
0. 이번 보고내용과 이제까지의 경과.
[이번 보고 내용]
이카로스의 후기운용(2011년 1월~ 2012년 3월)에 예정되었던 미션을 달성할 수 있었다. 후기운용에서 얻은 경과에 대해 보고한다.
[이제까지의 경과]
1. 2010년 5월 21일 발사 이후, 같은 해 12월까지 풀(full) 성공 상당의 운용을 전부 달성.(정상운용 종료. 부록1 참조.)
2. 2011년 1월, 우주개발위원회에서 이카로스 정상운용종료와 후기운용계획에 대해 보고.
(2012년 4월 이후의 후기운용에 대해서는 2012년 3월까지 운용계속 여부를 판단하는 것으로 되어있다.)
3. 2011년 1월부터 이카로스의 후기운용 실시.
4. 2012년 1월 6일 이카로스의 태양각, 태양거리가 증가하여 발생전력이 소비전력을 밑돌았기때문에 예측대로 동면모드로 전환했다.
1. 이카로스란?
소형 태양전력돛 실증기 '이카로스'
태양전력돛이란..
태양돛의 돛 일부에 박막태양전지를 붙여서 태양광을 받아 가속할뿐만 아니라 태양광발전도 동시에 할 수 있는 일본 오리지날의 컨셉이며, 이카로스로 최초로 실증했다.
향후 구상으로 태양돛과 고성능 이온엔진의 하이브리드 추진에 의한 목성, 트로이군 소행성 탐사를 연구 중에 있다.
2. 후기운용의 미션 개요.
* 태양전력돛 미션.
이하,
(1) 미션항목
미션요구
-> 확인결과.
(1) 대형막면의 전개, 전장.
(1-1) 전장상태를 평가하여 막면의 기계적 열화를 평가한다.
-> 달성.
(1-2) 막면 거동, 막면형상의 변화를 적극적으로 이끌어내어 전장상태의 역학모델을 구축한다.
-> 달성.
(2) 전력돛에 의한 발전.
(2-1) 발전성능을 평가하여 박막태양전지시스템의 열화를 평가한다.
-> 달성.
(3) 태양돛에 의한 가속실증.
(3-1) 막면의 가속성능을 평가하여 막면 반사성능의 열화 및 광자가속의 자세의존성을 평가한다.
-> 달성.
(3-2) 막면평태변화로부터 태양광압의 반사율과 면적 분리정밀도를 향상시켜 막면의 광학변수모델을 구축한다.
-> 달성.
(4) 태양돛에 의한 항행기술의 획득.
(4-1) 이카로스와 지구의 거리가 커지는 것을 이용하여 광자가속하의 궤도결정정밀도를 평가한다.
-> 달성.
(4-2) 궤도주기단위의 장기적인 유도제어성을 평가한다.
-> 달성.




*그 외의 미션 (부록2참조)
- 옵션기기(GAP, ALADDIN)에 의한 과학관측.
GAP에 의한 세계최초의 감마선 폭발의 편관을 확인했다.
ALADDIN에 의한 내행성 영역의 우주먼지분포가 거의 한 자리수 연속적으로 상승하는 것을 밝혀냈다.
(주) GAP(GAmma-ray burst Polarimeter) : 감마선 폭발 편광검출기.
ALADDIN(Arrayed Large-Area Dust Detector for INterplanetar Space) : 대면적우주먼지검출기.
- 신규개발기구(기액평형 스러스터)의 성능평가.
기액평형스러스터의 추력, 비추력을 평가하여, 기액분리기능을 실증했다.
소형우주선용추진계로써 폭넓게 사용할 수 있는 전망을 얻었다.
3. 후기운용의 성과보고.
후기운용에서는 다음 페이지의 '표-1 후기운용미션의 성과확인'에 있듯이, 각 테마가 모두 달성된 것을 확인했다.
또한 후기운용에 대해서는 이하의 2가지 테마에 관련해 정상운용에서 설정한 태양각과 회전률의 제약을 풀어 적극적으로 광범위하게 변화시켜 목적을 달성했다.
* 태양각(<30도), 회전률(>1rpm)
(1-2) 전장상태의 역학모델을 구축한다. -> (실시방법) 저회전운용, 역회전운용.
(막면형태의 변화를 적극적으로 이끌어내어 실현.)
(3-2) 막면의 광학변수모델을 구축한다. -> (실시방법) 큰 자세변경운용.
(태양광압토크에 의한 막면자세운동을 적극적으로 이끌어내어 실현.)
이런 운용에 의해 막면형태 데이터와 막면자세운동 데이터를 얻어, 역학모델과 광학변수모델을 구축했다.
본 보고에서는 특히(1-2)와 (3-2)에 관해, 예상 외의 현상을 확인했기때문에 3.1항 및 3.2항에서 소개한다.
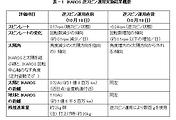
표-1 후기운용미션의 확인성과.
(2011년 1월~2012년 3월)
이하,
(1) 미션항목
미션요구
-> 확인결과.
(1) 대형막면의 전개, 전장.
(1-1) 전장상태를 평가하여 막면의 기계적 열화를 평가한다.
-> <달성> 모니터 카메라로 막면의 상태를 평가했다.
(1-2) 막면 거동, 막면형상의 변화를 적극적으로 이끌어내어 전장상태의 역학모델을 구축한다.
-> <달성> 저회전운용, 역회전운용을 하여, 막면강성이 예상보다 충분히 큰 현상을 판명했다.[예상 외 현상1]
이것을 토대로 전장상태의 역학모델을 구축했다.
다만, 막면형태를 예측하기에는 막면강성의 발생 메커니즘을 알 필요가 있다.
(2) 전력돛에 의한 발전.
(2-1) 발전성능을 평가하여 박막태양전지시스템의 열화를 평가한다.
-> <달성> 정기적인 발전 데이터를 얻어, 발전성능의 열화를 평가했다.
(3) 태양돛에 의한 가속실증.
(3-1) 막면의 가속성능을 평가하여 막면 반사성능의 열화 및 광자가속의 자세의존성을 평가한다.
-> <달성> 복수의 자세변경을 하여 광자가속의 자세의존성을 더욱 광범위한 자세에서 평가했다. 또한 막면의 반사성능 열화에 대해서도 평가했다.
(3-2) 막면평태변화로부터 태양광압의 반사율과 면적 분리정밀도를 향상시켜 막면의 광학변수모델을 구축한다.
-> <달성> 큰 자세변경운용을 하여, 회전축, 회전률이 소용돌이 운동, 풍차효과에 의해 변화하는 것을 판명했다.[예상 외 현상2] 이를 토대로 광학변수모델을 구축했다.
다만, 막면자세운동을 예측하기에는 막면변형(휨, 비틀림)의 발생메커니즘을 알 필요가 있다.
(4) 태양돛에 의한 항행기술의 획득.
(4-1) 이카로스와 지구의 거리가 커지는 것을 이용하여 광자가속하의 궤도결정정밀도를 평가한다.
-> <달성> 정상운용시에 확립한 궤도결정방법을 후기운용에서 실시하여 그 유용성을 확인했다. 지구거리의 변화에 의한 궤도결정정밀도의 변화를 평가했다.
(4-2) 궤도주기단위의 장기적인 유도제어성을 평가한다.
-> <달성> 1태양주회 이상에 이르는 궤도 데이터를 취득했다. 다양한 지구거리, 태양거리에 의한 유도제어성을 평가했다. 또한 복수의 자세변경을 하여, 적극적으로 광자가속을 이용한 유도제어성을 평가했다.


3.1 막면형태에 관한 예상 외 현상(1/2)
[계획단계]
막면형태는 원심력, 태양광압, 막면강성으로 결정되고, 충분한 원심력 > 태양광압 > 막면강성 으로 예상했다.
[정상운용결과]

충분한 원심력을 얻는 회전률을 설정하여, 막면을 플랫(plat, 평평한) 상태가 될 것으로 예상했으나, 완전한 플랫 상태가 되지 않았다. 이로인해 막면강성이 예상보다 큰 것을 알 수 있다.
[후기운용결과1] (저회전 운용)
회전률을 낮춰 원심력을 작게하여 태양광압이 지배적으로 되고, 막면이 크게 휠 것으로 예상했지만, 거의 변화가 없었다. 이런 것으로부터도 막면강성이 예상보다 큰 것을 알 수 있다.
[대응]
막면형태를 재현하도록 역학모델을 검토했다.
이 모델 검토를 토대로 다음으로 역회전 운용이 가능하다는 전망을 얻었다.
1.0rpm(정상운용) -> 0.055rpm(저회전 운용)
좌측 이미지 : 사전 시뮬레이션.
우측 이미지 : 모니터 카메라 영상.
3.1 막면형태에 관한 예상 외 현상(2/2)
[후기운용결과2] (역회전 운용)
스러스터분사를 통해 역회전시켰다.
-> 회전률이 0 부근이라도 막면이 크게 휘지 않고, 역회전 상태로 전환됐다.
-> 스러스터 분사시의 막면의 진동이, 검토한 역학모델에 의한 사전시뮬레이션과 비행데이터로 거의 일치했다. 이로부터 역학모델이 타당하다는 것이 확인되었다.
다만, 막면강성의 발생메커니즘에 대해서는 해명되지 않았다.
이미지 : 0rpm(역회전 운용)
좌측 그래프 : 사전 시뮬레이션.
우측 그래프 : 비행 데이터.
3.2 막면자세운동에 관한 예상 외 현상. (1/2)
[설계단계]
하야부사와 마찬가지로, 태양광압토크를 받아 회전축이 태양광압 평행 자세 주위를 원운동(나무공이? 운동)할 것으로 예상했다. (부록3참조)
[정상운용단계(오른쪽 그림)]
이카로스에서는 막면변형(휨)이 원인으로 회전축이 태양광압 평형자세 주위를 소용돌이 운동하는 것을 판명했다.
(나무공이 운동의 머리 각도가 점점 작아진다.)
[후기운용결과] (큰 자세변경운용)
큰 자세변경으로 소용돌이 운동을 폭넓은 범위에서 확인했다.
[대응]
큰 자세변경에 의해 소요돌이 운동을 적극적으로 이용한 항법유도제어를 실시했다. 소용돌이 운동으로부터 막면변형(휨)을 추정했다.
다만, 휨의 발생 메커니즘은 불명.
3.2 막면자세운동에 관한 예상 외 현상. (2/2)
[설계단계]
막면형상(비틀림)이 원인으로 풍차효과가 발생, 회전률이 변화할 가능성이 있을 것으로 예측됐으나 구체적인 경향은 파악할 수 없었다.
[정상&후기운용결과]
폭넓은 범위에서 풍차효과에 의해 회전률이 변화하는 상황을 확인했다.
-> 통상 : 감소경향, 역회전 전환 후 : 증가경향 (회전률에 의해 변화율이 달라진다.)
[대응]
풍차효과를 이용한 방법유도제어를 실시했다.
풍차효과로부터 막면변형(비틀림)을 추정했다. 다만, 비틀림의 발생 메커니즘은 불명.
4. 2012년의 이카로스 운용 방침.
- 이카로스는 현재 동면모드이며, 자세, 궤도예측으로부터 2012년 5월~10월 사이 데이터 취득의 가능성이 있다. 다만, 동면모드에서 복구되는 시기에 대해서는 자세, 궤도운용에 따라 2개월정도의 오차가 있다.
- 복구될 경우, 막면형태 데이터 및 자세운동데이터를 얻는다. 이것으로 앞서 언급한 예상 외 현상에 대해 발생 메커니즘을 자세히 조사하여, 이미 구축한 막면 역학모델 및 광학변수모델의 정밀도를 높인다.
동면모드에서 복구하는 시기의 차이 (전후 2개월)
데이터 취득.
동면모드 전화 재현성 확인 등
부록.
부록1. 정상운용 (2010년 5월~2010년 12월)
이하
(1)미션항목
- 미션요구
확인결과
(1) 대형막면의 전개, 전장.
- 미래 탐사기와 비슷한 기구를 사용해 진공, 무중력 상태에서 직경 20m의 대형박면을 전개, 전장한다.
<완료>
5월 26일 선단(끝부분) 매스 분리, 6월 2~8일에 1차 전개, 6월 9일 2차 전개를 실시.
그 후에도 스핀(회전)에 의해 전장상태를 유지했다.
- 전개운동 및 전장상태를 평가해 전개, 전장 시뮬레이션에 사용할 분석모델에 반영한다.
<달성>
스핀 전개, 전장 움직임을 시뮬레이션에 의한 사전예측과 비교하여 대체적으로 일치하는 것을 확인하였다.
불일치의 원일 검증하여 분석모델에 반영하였다.
(2) 전력 돛에 의한 발전.
- 돛 위에 탑재된 박막태양전지로 발전해서, 막면(막표면) 위의 도선을 통해 이카로스 본체에서 확인한다.
<완료>
6월 10일 박막태양전지 시스템의 발정을 실증하였다.
- 돛 위에 탑재된 박막태양전지의 데이터를 얻어 특성을 파악한다.
<달성>
행성간 환경에서 박막태양전지 시스템의 특성평가를 주 1회정도 실시, 지상시험에서의 예측열화곡선과 비교하여 특성을 파악했다.
(3) 태양 돛에 의한 가속 실증.
- 태양 돛에 의한 가속효과를, 궤도 결정(측거 데이터, 거리변화율 데이터)를 통해 확인한다.
<완료>
막면 전개 후, 궤도 결정을 통해 광자가속효과를 확인, 추력이 설계치와 거의 일치하는 것을 확인했다.
- 가속성능을 평가하여, 목표천체까지의 궤도를 설계하는 계산 방법에 반영한다.
<달성>
광학특성을 고려하여 자세제어 다이나믹스를 구축, 광학 패러미터 동정법(변수분리법)을 확립, 궤도계획계에 반영하였다.
(4) 태양 돛의 의한 항행기술의 취득.
- 광자가속상태에서 탐사기의 궤도결정기술을 확인한다.
<달성>
광자가속모델을 구축, 트랙킹(추적)을 포함해 실운용에 견딜 수 있는(적용할 수 있는) 궤도결정방법을 확립했다.
또한 실운용에서 유효성을 확인하였다.
- 돛 조작에 의한 광압벡터(광자가속 방향)의 능동적 제어 및 이를 이용한 항법유도기술을 확인한다.






<달성>
능동적으로 돛 자세상태를 제어함으로써 예정대로의 궤도제어가 가능함을 확인하였다.
금성을 향한 유도를 실시, 항법유도기술을 확인하였다.
달성 : 미션요구내용을 어느정도 만족시킨 것을 확인할 수 있었다. 후기운용 데이터를 포함한 추가분석을 통해 추가적인 성과가 기대된다.
완료 : 미션요구내용을 완전히 충족시킨 것을 확인할 수 있었다.
부록2.1 옵션기기미션.
(1) GAP : 감마선 폭발 편광검출기(GAP = GAmma-ray- burst Polarimeter)
중심의 산란체와 그것을 둘러싼 12개의 형광검출기로 구성된 산란형 감마선 편광검출기로,
세계최초로 감마선 폭발의 편광도를 측정한다.
(2) ALDN : 대면적 우주먼지 검출기.
(ALLADDIN = Arrayed Large-Area Dust Detector for INterplanetary Space)
우주먼지의 충돌시각, 신호피크치, 신호의 감쇠시간 등을 기록하고, 지구보다 태양에 가까운 영역의 우주먼지 분포를 해명한다.
(3) VLBI : 계측형 멀티 톤 송신기. (VLBI = Very Long Baseline Interferomery)
아주 멀리서 빛나고 있는 퀘이사를 이용하여 이카로스의 궤도를 정확히 측정한다.
VLBI 기술을 확실히 습득하고, 미래 미션에서 정상적으로 VLBI를 이용한 고정밀도 궤도결정을 할 수 있도록 한다.
부록2.2 GAP(감마선 폭발 편광검출기)의 성과.
(1) 약 30개의 감마선 폭발(GRB)를 검출했다.
(2) 수 개에서 GRB 편광을 확인했다.(세계최초)
(3) 게다가 단시간에 편광각이 변화한다.
(4) GRB방사는 강자장 중의 싱크로트론 방사일 것이다. 제트는 여러 개 있는듯 하다.
부록 2.3 ALADDIN(대면적우주먼지검출기)의 성과.
(1) 국산 최초, 세계최대면적의 우주먼지검출기의 우주 실증.
국산 최초의 우주먼지검출기이며, 역사상최대의 검출면적(0.54m2). 2010년6월~2011년10월의 17개월, 지구궤도~금성궤도 사이에서 약 2800개의 먼지 초고속충돌을 검출했다.
(2) 태양계 내 우주 먼지분포의 일심(태양중심) 거리 의존성의 연구.



지구에서 금성근접까지의 영역에서, 태양에 근접할수록 연속적으로 거의 한자리 수 연속적으로 상승하는 우주먼지의 분포구조를 전례없는 시간분해능으로 밝혀냈다.
부록2.4 신규개발기기의 성능평가.
- 이카로스에는 추친계로 새롭게 개발한 기액평행스러스터가 채용되어있다.
(액화가스를 액체상태로 저장, 기화한 가스만을 분사하는 추친계.
불연성, 무독의 추진제를 채용할 수 있기때문에 소형우주기기용 추진계로 유망하다.)
- 기액평형스터스터에는 추진제의 기액분리가 매우 중요한 과제이다.
이카로스에서는 이것을 실현하기위해 탱크에 발포금속을 넣은 연구를 실시했다.
- 2011년 12월에 추진제의 고갈을 확인, 이제까지의 분사이력으로부터 추력, 비추력에 대한 평가를 실시한 결과, 거의 이론대로의 성능을 발휘한 것을 확인하여, 상기 탱크의 기액분리기능이 대해서도 실증되었다.
부록3. 하야부사의 자세운동.
- 하야부사에서는 확산반사(난반사)에 의한 태양광압 토크에 의해 회전축이 태양광압 중심 주위를 원운동했다.
-> 태양광압력 중심이 탐사기 질량중심과 다르기때문에 토크가 생겨 소용돌이 운동이 발생했다.
- 리액션 휠(reaction wheel) 및 추진계 고장으로인해, 이 자세운동을 자세제어에 적극적으로 이용했다.
- 2012년 9월 8일 동면모드에서의 복구를 확인.
이카로스는 2012년 1월 6일 동면모드(발생 전력 저하에 의한 탑재기기 종료.)로 전환된 것이 확인되었습니다.
이후 월 2회 이카로스의 탐색을 계속해 온 결과, 2012년 9월 6일(목)에 이카로스로 보이는 전파를 발견.
8일(토)에 이카로스임을 확인했습니다.
이를 통해 이카로스가 동면 모드에서 복구된 것을 확인했습니다.
현재 이카로스의 상태에 대해서는 확인 중입니다.


'SpaceExploration' 카테고리의 다른 글
| 통신불가범위에 대해 (IKAROS, 태양돛) (0) | 2013.05.20 |
|---|---|
| 2011년 10월 18일 이카로스 역회전(逆spin) 운영 실시. (이카로스, 태양돛) (0) | 2013.05.19 |
| 2011년 1월 27일 이카로스 정상 운용 종료. (IKAROS, 태양돛) (0) | 2013.05.18 |
| 탐사선 하야부사 소행성 물질 채취 성공. (2) | 2010.11.18 |
| 소행성 탐사선 하야부사캡슐의 미립자 사진. (0) | 2010.10.10 |



댓글